MicroPilot
Board Autopilots
Since the company began in 1994, MicroPilot autopilots have been compact, lightweight, and powerful. They have flown everything from one-pound MAVs/backpacks to high-speed, turbine-powered drones. MicroPilot offers more flexibility and selection in autopilots than ever before to meet clients’ needs, ranging from sophisticated data and imaging UAV systems to entry-level or single-use applications

Enclosed Autopilots
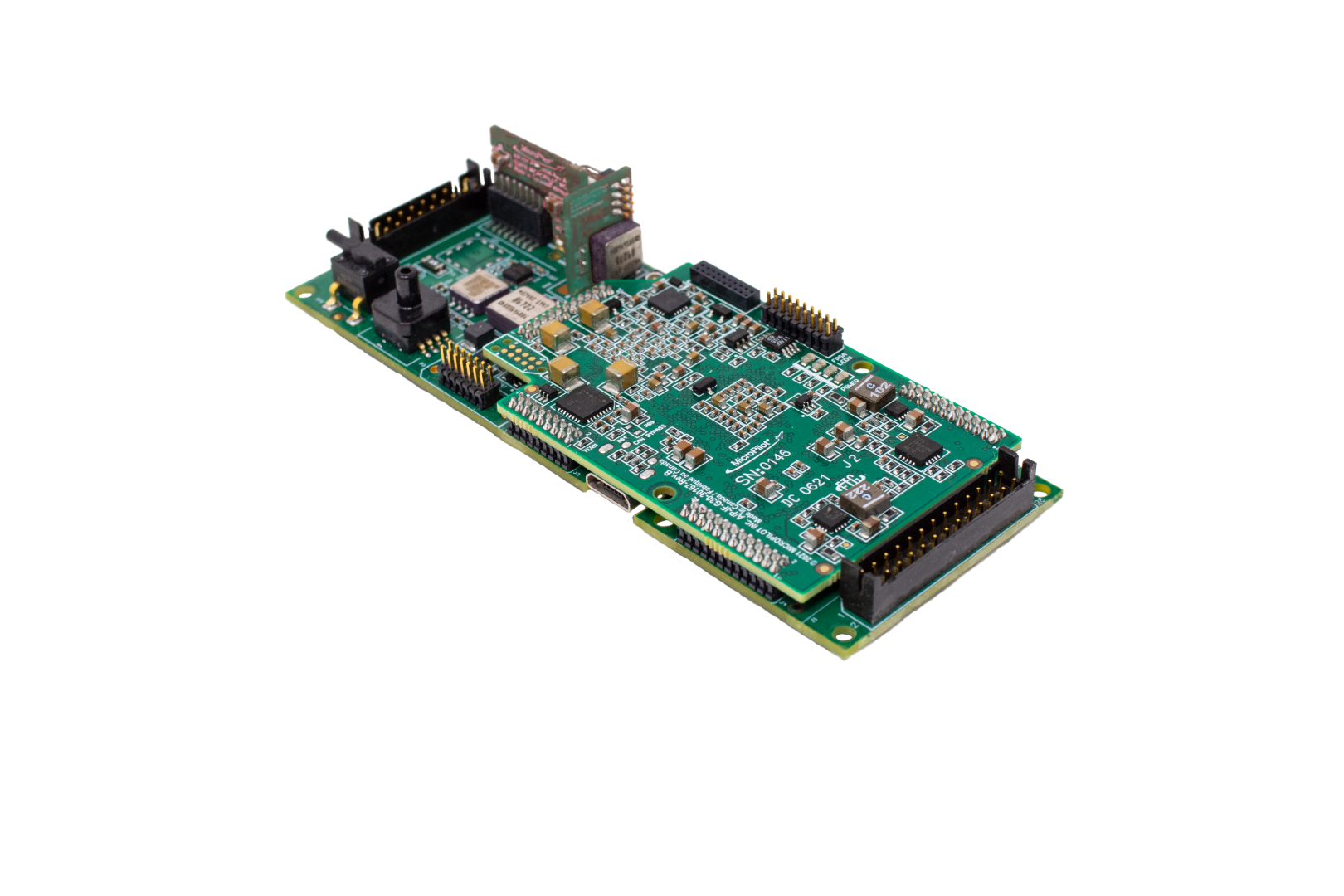
Equipped with full airside and groundside UAV system components, the MP2128LRC2 is MicroPilot’s premium UAV autopilot package. This long-range communication (LRC) autopilot provides an integrated, redundant, long-range data communication link. With this feature, operators benefit from greater distance and flexibility

Triple Redundant Autopilots
Triple redundancy (3X) gives autopilot technology the reliability necessary to safely carry out sensitive flight missions and transport valuable payloads. A triple redundant arrangement is comprised of three similar software and hardware systems. If any one of the three systems fails, the remaining two take over, offering a double redundancy arrangement. If one of the other two systems should fail, the third takes over. An additional mechanism is also included to oversee these three systems. Triple redundant systems are highly tolerant of autopilot hardware failures

HORIZONmp
The choice of over 1500 clients in 100 countries, HORIZONmp ground control software offers a user-friendly, point-and-click interface. Developed by MicroPilot for the MP2x28 series of autopilots, HORIZONmp runs on a Windows, Android, and iOS
XTENDERmp
XTENDERmp taps into the power of a world-recognized autopilot and expands it to fill the gap between standard autopilot functionality and your specific requirements.
- Add your own code to MicroPilot’s autopilots
- Develop interfaces to critical onboard devices
- Add custom logic and modify feedback loops
- Add functionality to HORIZONmp or develop your own GCS

trueHWIL2
MicroPilot’s True Hardware-in-the-Loop (trueHWIL2) simulator offers UAV integrators and researchers the highest-fidelity UAV autopilot simulation available on the market today
Existing quasi-hardware-in-the-loop simulators approximate a UAV’s flight by exchanging sensor and control surface position information with the autopilot over a serial port or CAN bus. This form of simulation introduces inaccuracies as an autopilot in flight reads this information directly from its sensors instead of a serial port or CAN bus